Урок робот

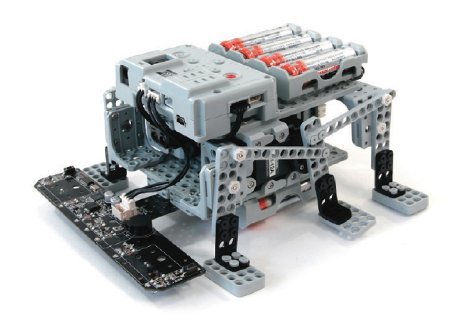
Инструкция по сборке. Конструктор для уроков труда 3в1 (Робот Р1, Робот Р2, ЗПУ) (02214)
Учебный курс ориентирован на начинающих и не требует специальных входных знаний. Автор — преподаватель робототехники Олег Горнов. На уроке продолжаем рассматривать программы с декомпозицией.





")





Ученые КФУ получили сертификаты об окончании программы развития резерва в области науки, технологий и высшего образования. Фестиваль «Студенческая весна — » приближается к экватору. В униклинике КФУ выполняют локальные инъекции противовоспалительного препарата под рентген-контролем. В ходе первого занятия робот познакомился с детьми и провел с ними зарядку.










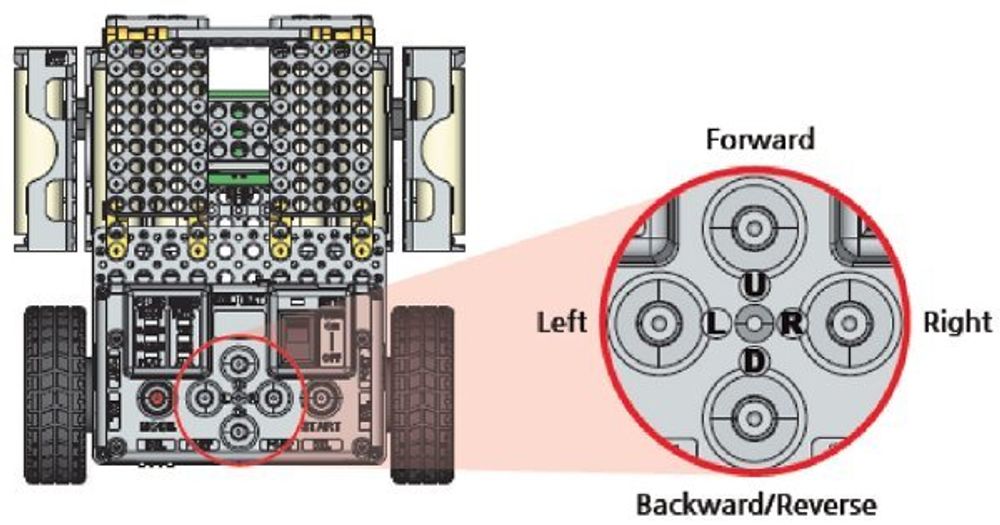
Одна из ключевых задач мобильной робототехники — это поиск маршрута для движения и его оптимизация. Перемещаясь в рабочей местности, робот должен постоянно оценивать окружающую обстановку, определять свое положение и положение окружающих его объектов. Существует множество различных способов, с помощью которых робот может определять собственное положение и строить маршрут между точками назначения.






Похожие статьи
- Как сделать из лего робота трансформера видео
- Как сделать куклу своими руками видео быстро - Пошаговые видео-уроки изготовления чулочной куклы сво
- Arduino управление драйвером шагового двигателя - Arduino UNO урок 13 - драйвер двигателя L298N
- Вяжем себе сами кардиганы - Кардиган Вязание спицами, крючком, уроки вязания